జతచేయబడిన పొటెన్షియోమీటర్ను తిప్పడం ద్వారా కనెక్ట్ చేయబడిన మోటారు వేగాన్ని సరళంగా నియంత్రించడానికి వినియోగదారుని అనుమతించే సర్క్యూట్ను మోటారు స్పీడ్ కంట్రోలర్ సర్క్యూట్ అంటారు.
DC మోటారుల కోసం స్పీడ్ కంట్రోలర్ సర్క్యూట్లను నిర్మించటానికి 3 సులభం, ఇక్కడ ఒకటి MOSFET IRF540, రెండవది IC 555 మరియు మూడవ కాన్సెప్ట్ IC 556 తో టార్క్ ప్రాసెసింగ్ కలిగి ఉంది.
డిజైన్ # 1: మోస్ఫెట్ ఆధారిత DC మోటార్ స్పీడ్ కంట్రోలర్
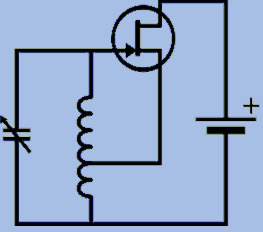
క్రింద చూపిన విధంగా చాలా చల్లని మరియు తేలికైన DC మోటార్ స్పీడ్ కంట్రోలర్ సర్క్యూట్ కేవలం ఒకే మోస్ఫెట్, రెసిస్టర్ మరియు కుండ ఉపయోగించి నిర్మించవచ్చు:

BJT ఉద్గారిణి అనుచరుడిని ఉపయోగించడం

ఈ కాన్ఫిగరేషన్ గురించి మరింత తెలుసుకోవడానికి మోస్ఫెట్ సోర్స్ ఫాలోవర్ లేదా సాధారణ డ్రెయిన్ మోడ్ వలె రిగ్ చేయబడి ఉంటుంది. ఈ పోస్ట్ చూడండి , ఇది BJT సంస్కరణను చర్చిస్తుంది, అయినప్పటికీ పని సూత్రం అలాగే ఉంటుంది.
పై DC మోటారు కంట్రోలర్ రూపకల్పనలో, కుండ సర్దుబాటు మోస్ఫెట్ యొక్క గేట్ అంతటా విభిన్న సంభావ్య వ్యత్యాసాన్ని సృష్టిస్తుంది మరియు మోస్ఫెట్ యొక్క సోర్స్ పిన్ ఈ సంభావ్య వ్యత్యాసం యొక్క విలువను అనుసరిస్తుంది మరియు తదనుగుణంగా మోటారు అంతటా వోల్టేజ్ను సర్దుబాటు చేస్తుంది.
మూలం ఎల్లప్పుడూ గేట్ వోల్టేజ్ కంటే 4 లేదా 5 వి వెనుకబడి ఉంటుందని మరియు ఈ వ్యత్యాసంతో పైకి / క్రిందికి మారుతుందని ఇది సూచిస్తుంది, మోటారు అంతటా 2 వి మరియు 7 వి మధ్య మారుతున్న వోల్టేజ్ను ప్రదర్శిస్తుంది.
గేట్ వోల్టేజ్ 7 వి చుట్టూ ఉన్నప్పుడు, మోటారుకు సోర్స్ పిన్ కనీస 2 విని సరఫరా చేస్తుంది మరియు మోటారుపై చాలా నెమ్మదిగా తిరుగుతుంది మరియు కుండ సర్దుబాటు గేట్ యొక్క గేట్ అంతటా పూర్తి 12 విని ఉత్పత్తి చేసినప్పుడు సోర్స్ పిన్ అంతటా 7 వి అందుబాటులో ఉంటుంది. మోస్ఫెట్.
మోస్ఫెట్ సోర్స్ పిన్ గేటును 'అనుసరిస్తున్నట్లు' కనబడుతోందని, అందువల్ల పేరు సోర్స్ ఫాలోయర్ అని ఇక్కడ మనం స్పష్టంగా చూడవచ్చు.
ఇది జరుగుతుంది ఎందుకంటే మోస్ఫెట్ యొక్క గేట్ మరియు సోర్స్ పిన్ మధ్య వ్యత్యాసం ఎల్లప్పుడూ 5V చుట్టూ ఉండాలి, మోస్ఫెట్ సరైన విధంగా నిర్వహించడానికి వీలు కల్పిస్తుంది.
ఏదేమైనా, పై కాన్ఫిగరేషన్ మోటారుపై సున్నితమైన వేగ నియంత్రణను అమలు చేయడానికి సహాయపడుతుంది మరియు డిజైన్ చాలా చౌకగా నిర్మించబడుతుంది.
మోస్ఫెట్ స్థానంలో ఒక BJT ను కూడా ఉపయోగించవచ్చు, వాస్తవానికి BJT మోటారు అంతటా 1V నుండి 12V వరకు అధిక నియంత్రణ పరిధిని ఉత్పత్తి చేస్తుంది.
వీడియో డెమో
https://youtu.be/W762NTuQ19gమోటారు వేగాన్ని ఏకరీతిగా మరియు సమర్ధవంతంగా నియంత్రించే విషయానికి వస్తే, పిడబ్ల్యుఎం ఆధారిత నియంత్రిక ఆదర్శ ఎంపిక అవుతుంది, ఈ ఆపరేషన్ను అమలు చేయడానికి ఒక సాధారణ సర్క్యూట్ గురించి ఇక్కడ మనం మరింత నేర్చుకుంటాము.
డిజైన్ # 2: ఐసి 555 తో పిడబ్ల్యుఎం డిసి మోటార్ కంట్రోల్
పిడబ్ల్యుఎం ఉపయోగించి సాధారణ మోటారు స్పీడ్ కంట్రోలర్ రూపకల్పన ఈ క్రింది విధంగా అర్థం చేసుకోవచ్చు:
ప్రారంభంలో సర్క్యూట్ శక్తితో ఉన్నప్పుడు, కెపాసిటర్ సి 1 ఛార్జ్ చేయబడనందున ట్రిగ్గర్ పిన్ లాజిక్ తక్కువ స్థితిలో ఉంటుంది.
పై పరిస్థితులు డోలనం చక్రాన్ని ప్రారంభిస్తాయి, తద్వారా అవుట్పుట్ ఒక లాజిక్ అధికంగా మారుతుంది.
అధిక ఉత్పత్తి ఇప్పుడు కెపాసిటర్ను D2 ద్వారా ఛార్జ్ చేయమని బలవంతం చేస్తుంది.
సరఫరాలో 2/3 వోల్టేజ్ స్థాయికి చేరుకున్నప్పుడు, పిన్ # 6 ఇది IC ట్రిగ్గర్ల ప్రవేశం.
క్షణం పిన్ # 6 ట్రిగ్గర్లు, పిన్ # 3 మరియు పిన్ # 7 తర్కం తక్కువగా మారుతుంది.
పిన్ # 3 తక్కువగా ఉండటంతో, సి 1 మళ్ళీ డి 1 ద్వారా డిశ్చార్జ్ అవ్వడం ప్రారంభిస్తుంది, మరియు సి 1 అంతటా వోల్టేజ్ సరఫరా వోల్టేజ్ యొక్క 1/3 స్థాయి కంటే తక్కువగా ఉన్నప్పుడు, పిన్ # 3 మరియు పిన్ # 7 మళ్ళీ అధికంగా మారతాయి, దీనివల్ల చక్రం అనుసరిస్తుంది మరియు పునరావృతం చేయండి.
D1, D2 డయోడ్ల ద్వారా మరియు వరుసగా కుండ అమర్చిన నిరోధక ఆయుధాల ద్వారా ఛార్జింగ్ మరియు డిశ్చార్జ్ చేసే ప్రక్రియ కోసం C1 రెండు వివిక్తంగా సెట్ చేసిన మార్గాలను కలిగి ఉండటం గమనించదగ్గ విషయం.
ఛార్జింగ్ మరియు డిశ్చార్జ్ చేసేటప్పుడు C1 ఎదుర్కొన్న ప్రతిఘటనల మొత్తం కుండ ఎలా అమర్చబడినా అదే విధంగా ఉంటుంది, కాబట్టి put ట్ పుట్ పల్స్ యొక్క తరంగదైర్ఘ్యం ఎల్లప్పుడూ ఒకే విధంగా ఉంటుంది.
ఏదేమైనా, ఛార్జింగ్ లేదా ఉత్సర్గ సమయ వ్యవధులు వాటి మార్గాల్లో ఎదురయ్యే ప్రతిఘటన విలువపై ఆధారపడి ఉంటాయి కాబట్టి, కుండ ఈ సమయ వ్యవధులను దాని సర్దుబాట్ల ప్రకారం వివేకంతో సెట్ చేస్తుంది.
ఛార్జ్ మరియు ఉత్సర్గ సమయ వ్యవధులు అవుట్పుట్ డ్యూటీ చక్రంతో నేరుగా అనుసంధానించబడినందున, ఇది కుండ యొక్క సర్దుబాటు ప్రకారం మారుతూ ఉంటుంది, అవుట్పుట్ వద్ద ఉద్దేశించిన వివిధ PWM పప్పులకు రూపం ఇస్తుంది.
మార్క్ / స్పేస్ రేషియో యొక్క సగటు ఫలితం PWM అవుట్పుట్కు దారితీస్తుంది, ఇది మోటారు యొక్క DC వేగాన్ని నియంత్రిస్తుంది.
పిడబ్ల్యుఎం పప్పులు మోస్ఫెట్ యొక్క గేటుకు ఇవ్వబడతాయి, ఇది కుండ యొక్క అమరికకు ప్రతిస్పందనగా కనెక్ట్ చేయబడిన మోటారు ప్రవాహాన్ని ప్రతిస్పందిస్తుంది మరియు నియంత్రిస్తుంది.
మోటారు ద్వారా ప్రస్తుత స్థాయి దాని వేగాన్ని నిర్ణయిస్తుంది మరియు తద్వారా కుండ ద్వారా నియంత్రణ ప్రభావాన్ని అమలు చేస్తుంది.
IC నుండి అవుట్పుట్ యొక్క ఫ్రీక్వెన్సీని సూత్రంతో లెక్కించవచ్చు:
F = 1.44 (VR1 * C1)
మోస్ఫెట్ అవసరం లేదా లోడ్ కరెంట్ ప్రకారం ఎంచుకోవచ్చు.
ప్రతిపాదిత DC మోటార్ స్పీడ్ కంట్రోలర్ యొక్క సర్క్యూట్ రేఖాచిత్రం క్రింద చూడవచ్చు:

నమూనా:

వీడియో టెస్టింగ్ ప్రూఫ్:
https://youtu.be/M-F7MWcSiFYDC మోటారు వేగాన్ని నియంత్రించడానికి IC 555 ఆధారిత డిజైన్ ఎలా ఉపయోగించబడుతుందో పై వీడియో క్లిప్లో మనం చూడవచ్చు. మీరు సాక్ష్యమిచ్చినట్లుగా, పిడబ్ల్యుఎంలకు ప్రతిస్పందనగా బల్బ్ సంపూర్ణంగా పనిచేస్తుంది మరియు దాని తీవ్రతను కనిష్ట గ్లో నుండి గరిష్ట కనిష్టానికి మారుస్తుంది, అయితే మోటారు అలా చేయదు.
మోటారు ప్రారంభంలో ఇరుకైన పిడబ్ల్యుఎమ్లకు ప్రతిస్పందించదు, పిడబ్ల్యుఎంలు గణనీయంగా ఎక్కువ పల్స్ వెడల్పులకు సర్దుబాటు చేసిన తర్వాత ఒక కుదుపుతో మొదలవుతుంది.
సర్క్యూట్లో సమస్యలు ఉన్నాయని దీని అర్థం కాదు, ఎందుకంటే DC మోటారు ఆర్మేచర్ ఒక జత అయస్కాంతాల మధ్య గట్టిగా పట్టుకుంది. ప్రారంభాన్ని ప్రారంభించడానికి ఆర్మేచర్ అయస్కాంతం యొక్క రెండు ధ్రువాల మీదుగా దాని భ్రమణాన్ని నెమ్మదిగా మరియు సున్నితమైన కదలికతో జరగదు. ఇది ఒక థ్రస్ట్ తో ప్రారంభించాలి.
అందుకే మోటారుకు మొదట్లో పిడబ్ల్యుఎం కోసం అధిక సర్దుబాట్లు అవసరమవుతాయి మరియు భ్రమణాన్ని ప్రారంభించిన తర్వాత ఆర్మేచర్ కొంత గతి శక్తిని పొందుతుంది మరియు ఇప్పుడు నెమ్మదిగా వేగాన్ని సాధించడం ఇరుకైన పిడబ్ల్యుఎంల ద్వారా సాధ్యమవుతుంది.
అయినప్పటికీ, పైన వివరించిన అదే కారణంతో భ్రమణాన్ని నెమ్మదిగా కదిలే స్థితికి తీసుకురావడం అసాధ్యం.
దిగువ చూపిన విధంగా మొదటి రేఖాచిత్రంలో కొన్ని మార్పులు చేయడం ద్వారా ప్రతిస్పందనను మెరుగుపరచడానికి మరియు నెమ్మదిగా సాధ్యమయ్యే PWM నియంత్రణను సాధించడానికి నేను నా వంతు ప్రయత్నం చేసాను:

ఈ విషయం చెప్పి, గేర్లు లేదా కప్పి వ్యవస్థ ద్వారా మోటారు జతచేయబడితే లేదా లోడ్తో కట్టితే మోటారు నెమ్మదిగా నియంత్రణలో చూపిస్తుంది.
ఇది జరగవచ్చు ఎందుకంటే లోడ్ మందకొడిగా పనిచేస్తుంది మరియు నెమ్మదిగా వేగం సర్దుబాట్ల సమయంలో నియంత్రిత కదలికను అందించడానికి సహాయపడుతుంది.
డిజైన్ # 3: మెరుగైన వేగ నియంత్రణ కోసం IC 556 ను ఉపయోగించడం
DC మోటారు వేగాన్ని మారుస్తుంది అంత కష్టం కాదని అనిపించవచ్చు మరియు మీరు దాని కోసం సర్క్యూట్లను పుష్కలంగా కనుగొనవచ్చు.
అయితే ఈ సర్క్యూట్లు తక్కువ మోటారు వేగంతో స్థిరమైన టార్క్ స్థాయిలకు హామీ ఇవ్వవు, దీనివల్ల పనితీరు చాలా అసమర్థంగా ఉంటుంది.
తగినంత టార్క్ కారణంగా చాలా తక్కువ వేగంతో, మోటారు నిలిచిపోతుంది.
మరో తీవ్రమైన లోపం ఏమిటంటే, ఈ సర్క్యూట్లలో మోటారు రివర్సల్ ఫీచర్ లేదు.
ప్రతిపాదిత సర్క్యూట్ పై లోపాల నుండి పూర్తిగా ఉచితం మరియు సాధ్యమైనంత తక్కువ వేగంతో కూడా అధిక టార్క్ స్థాయిలను ఉత్పత్తి చేయగలదు.
సర్క్యూట్ ఆపరేషన్
మేము ప్రతిపాదిత పిడబ్ల్యుఎం మోటారు కంట్రోలర్ సర్క్యూట్ గురించి చర్చించే ముందు, అంత సమర్థవంతంగా లేని సరళమైన ప్రత్యామ్నాయాన్ని కూడా నేర్చుకోవాలనుకుంటున్నాము. ఏదేమైనా, మోటారుపై భారం ఎక్కువగా లేనంత కాలం మరియు వేగం కనిష్ట స్థాయికి తగ్గించబడనంత కాలం ఇది మంచిదిగా పరిగణించబడుతుంది.
కనెక్ట్ చేయబడిన మోటారు వేగాన్ని నియంత్రించడానికి ఒకే 556 ఐసిని ఎలా ఉపయోగించవచ్చో ఈ బొమ్మ చూపిస్తుంది, మేము వివరాల్లోకి వెళ్ళలేము, ఈ కాన్ఫిగరేషన్ యొక్క ముఖ్యమైన లోపం ఏమిటంటే, టార్క్ మోటారు వేగానికి అనులోమానుపాతంలో ఉంటుంది.
ప్రతిపాదిత హై టార్క్ స్పీడ్ కంట్రోలర్ సర్క్యూట్ డిజైన్కు తిరిగి వస్తున్నప్పుడు, ఇక్కడ మేము ఒక ప్యాకేజీలో రెండు 555 ఐసిలను కలిగి ఉన్న ఒకటి లేదా ఒకే ఐసి 556 కు బదులుగా రెండు 555 ఐసిలను ఉపయోగించాము.
సర్క్యూట్ రేఖాచిత్రం

ప్రధాన లక్షణాలు
క్లుప్తంగా ప్రతిపాదిత DC మోటార్ కంట్రోలర్ కింది ఆసక్తికరమైన లక్షణాలను కలిగి ఉంది:
వేగం నిలిచిపోకుండా సున్నా నుండి గరిష్టంగా నిరంతరం మారుతూ ఉంటుంది.
టార్క్ వేగం స్థాయిలచే ఎప్పటికీ ప్రభావితం కాదు మరియు కనిష్ట వేగ స్థాయిలలో కూడా స్థిరంగా ఉంటుంది.
మోటారు భ్రమణాన్ని సెకనులో కొంత భాగంలో తిప్పవచ్చు లేదా తిప్పవచ్చు.
మోటారు భ్రమణం యొక్క రెండు దిశలలో వేగం వేరియబుల్.
ఆ రెండు 555 ఐసిలు రెండు వేర్వేరు ఫంక్షన్లతో కేటాయించబడతాయి. ఒక విభాగం 100 Hz చదరపు వేవ్ గడియారాలను ఉత్పత్తి చేసే అస్టేబుల్ మల్టీవైబ్రేటర్గా కాన్ఫిగర్ చేయబడింది, ఇది ప్యాకేజీ లోపల 555 విభాగానికి ముందు ఇవ్వబడుతుంది.
పై ఫ్రీక్వెన్సీ PWM యొక్క ఫ్రీక్వెన్సీని నిర్ణయించడానికి బాధ్యత వహిస్తుంది.
ట్రాన్సిస్టర్ బిసి 557 ను స్థిరమైన ప్రస్తుత వనరుగా ఉపయోగిస్తారు, ఇది ప్రక్కనే ఉన్న కెపాసిటర్ను దాని కలెక్టర్ ఆర్మ్ వద్ద ఛార్జ్ చేస్తుంది.
ఇది పై కెపాసిటర్ అంతటా ఒక సా-టూత్ వోల్టేజ్ను అభివృద్ధి చేస్తుంది, ఇది 556 IC లోపల చూపబడిన పిన్-అవుట్ కంటే బాహ్యంగా వర్తించే నమూనా వోల్టేజ్తో పోల్చబడుతుంది.
నమూనా వోల్టేజ్ బాహ్యంగా వర్తిస్తుంది సాధారణ 0-12V వేరియబుల్ వోల్టేజ్ విద్యుత్ సరఫరా సర్క్యూట్ నుండి పొందవచ్చు.
556 IC కి వర్తించే ఈ మారుతున్న వోల్టేజ్ అవుట్పుట్ వద్ద పప్పుల యొక్క PWM ని మార్చడానికి ఉపయోగించబడుతుంది మరియు చివరికి ఇది కనెక్ట్ చేయబడిన మోటారు యొక్క వేగ నియంత్రణ కోసం ఉపయోగించబడుతుంది.
అవసరమైనప్పుడు మోటారు దిశను తక్షణమే రివర్స్ చేయడానికి స్విచ్ ఎస్ 1 ఉపయోగించబడుతుంది.
భాగాల జాబితా
- R1, R2, R6 = 1K,
- R3 = 150K,
- R4, R5 = 150 ఓంలు,
- R7, R8, R9, R10 = 470 ఓంలు,
- C1 = 0.1uF,
- C2, C3 = 0.01uF,
- C4 = 1uF / 25VT1,
- T2 = TIP122,
- T3, T4 = TIP127
- T5 = BC557,
- T6, T7 = BC547,
- D1 --- D4 = 1N5408,
- Z1 = 4V7 400mW
- IC1 = 556,
- S1 = SPDT టోగుల్ స్విచ్
పై సర్క్యూట్ కింది మోటారు డ్రైవర్ సర్క్యూట్ నుండి ప్రేరణ పొందింది, ఇది ఎలెక్టార్ ఎలక్ట్రానిక్ ఇండియా మ్యాగజైన్లో చాలా కాలం క్రితం ప్రచురించబడింది.
IC 555 ఉపయోగించి మోటార్ టార్క్ నియంత్రించడం

మోటారు రివర్సల్ ఆపరేషన్ కోసం డిపిడిటి స్విచ్ను ఉపయోగించడం ద్వారా మరియు స్పీడ్ కంట్రోల్ అమలు కోసం ఉద్గారిణి అనుచరుడు ట్రాన్సిస్టర్ను ఉపయోగించడం ద్వారా మొదటి మోటారు నియంత్రణ రేఖాచిత్రాన్ని చాలా సరళీకృతం చేయవచ్చు, క్రింద చూపిన విధంగా:

సింగిల్ ఆప్ ఆంప్ ఉపయోగించి ప్రెసిషన్ మోటార్ కంట్రోల్
D.c. యొక్క అత్యంత శుద్ధి చేసిన లేదా క్లిష్టమైన నియంత్రణ ఆప్-ఆంప్ మరియు టాచో-జనరేటర్ ఉపయోగించి మోటారును సాధించవచ్చు. ఆప్-ఆంప్ వోల్టేజ్ సెన్సిటివ్ స్విచ్ వలె రిగ్ చేయబడింది. దిగువ ప్రదర్శించిన సర్క్యూట్లో, టాకో-జెనరేటర్ యొక్క అవుట్పుట్ ప్రీసెట్ రిఫరెన్స్ వోల్టేజ్ కంటే తక్కువగా ఉన్న వెంటనే స్విచ్చింగ్ ట్రాన్సిస్టర్ ఆన్ చేయబడి, మోటారుకు 100% శక్తి అందించబడుతుంది.
ఆప్ ఆంప్ యొక్క స్విచ్చింగ్ చర్య రిఫరెన్స్ వోల్టేజ్ చుట్టూ కేవలం రెండు మిల్లివోల్ట్లలో జరుగుతుంది. మీకు ద్వంద్వ విద్యుత్ సరఫరా అవసరం, ఇది కేవలం జెనర్ స్థిరీకరించబడవచ్చు.

ఈ మోటారు నియంత్రిక ఏ విధమైన యాంత్రిక అవాంతరాలను కలిగి లేకుండా అనంతమైన సర్దుబాటు పరిధిని అనుమతిస్తుంది.
ఆప్ ఆంప్ అవుట్పుట్ సరఫరా పట్టాల స్థాయిలో +/- 10% మాత్రమే, అందువల్ల డబుల్ ఉద్గారిణి అనుచరుడిని నియమించడం ద్వారా భారీ మోటారు వేగం నియంత్రించబడుతుంది.
రిఫరెన్స్ వోల్టేజ్ థర్మిస్టర్లు లేదా ఎల్డిఆర్ మొదలైన వాటి ద్వారా పరిష్కరించబడుతుంది. సర్క్యూట్ రేఖాచిత్రంలో సూచించిన ప్రయోగాత్మక ఏర్పాటు RCA 3047A op amp, మరియు 0.25W 6V మోటారును టాచో-జెనరేటర్గా ఉపయోగించుకుంది, ఇది 4V చుట్టూ 13000 rpm వద్ద 4V చుట్టూ ఉత్పత్తి చేస్తుంది ఉద్దేశించిన అభిప్రాయం.
మునుపటి: 3 ఉత్తమ జూల్ దొంగ సర్క్యూట్లు తర్వాత: ప్రెజర్ కుక్కర్ విజిల్ కౌంటర్ సర్క్యూట్