పోస్ట్ ఒక DC మోటార్ కంట్రోలర్ను వివరిస్తుంది, ఇది మోటారుపై లోడ్తో సంబంధం లేకుండా స్థిరమైన వేగంతో నడపడానికి స్థిరమైన టార్క్ పరిహారాన్ని కలిగి ఉంటుంది.
సాధారణ స్పీడ్ కంట్రోలర్ల లోపం
మెజారిటీ యొక్క ఒక లోపం సాధారణ వేగ నియంత్రికలు అవి మోటారును ముందుగా నిర్ణయించిన స్థిరమైన వోల్టేజ్తో మాత్రమే అందిస్తాయా? ఫలితంగా టార్క్ పరిహారం లేకపోవడం వల్ల వేగం స్థిరంగా ఉండదు మరియు మోటారుపై లోడ్తో మారుతుంది.
ఉదాహరణకు, ఒక మోడల్ రైలులో, సాధారణ నియంత్రికలతో రైలు వేగం ఎక్కే ప్రవణతలకు క్రమంగా తగ్గుతుంది మరియు లోతువైపు వెళ్ళేటప్పుడు వేగవంతం అవుతుంది.
అందువల్ల మోడల్ రైళ్ల కోసం, ఎంచుకున్న మోటారు వేగాన్ని కొనసాగించడానికి పాట్ కంట్రోల్ సర్దుబాటు అదేవిధంగా ఇంజిన్ టగ్గింగ్ చేయగల లోడ్ను బట్టి మారుతుంది.
ఈ వ్యాసంలో వివరించిన స్థిరమైన టార్క్ మోటారు స్పీడ్ కంట్రోలర్ సర్క్యూట్ మోటారు వేగాన్ని ట్రాక్ చేయడం ద్వారా మరియు మోటారుపై లోడ్ ఎంత ఉన్నా, ముందుగా నిర్ణయించిన నియంత్రణ సెట్టింగ్ కోసం స్థిరంగా ఉంచడం ద్వారా ఈ సమస్యను తొలగిస్తుంది.
DC శాశ్వత మాగ్నెట్ మోటారును ఉపయోగించే చాలా మోడళ్లలో సర్క్యూట్ వర్తించవచ్చు.
వెనుక EMF కారకాన్ని లెక్కిస్తోంది
మోటారు టెర్మినల్స్ అంతటా వోల్టేజ్ కొన్ని కారకాలను కలిగి ఉంటుంది, వెనుక e.m.f. మోటారు ద్వారా ఉత్పత్తి అవుతుంది, మరియు వోల్టేజ్ ఆర్మేచర్ నిరోధకత అంతటా పడిపోయింది.
వెనుక e.m.f. మోటారు వైండింగ్ ద్వారా ఉత్పత్తి చేయబడినది సాధారణంగా మోటారు వేగానికి అనులోమానుపాతంలో ఉంటుంది, అంటే ఈ వెనుక emf కంటెంట్ను కొలవడం ద్వారా మోటారు వేగాన్ని పర్యవేక్షించవచ్చు. కానీ, ప్రధాన సమస్య ఏమిటంటే వెనుక భాగాన్ని వేరుచేయడం మరియు గుర్తించడం e.m.f. ఆర్మేచర్ రెసిస్టెన్స్ వోల్టేజ్ నుండి.
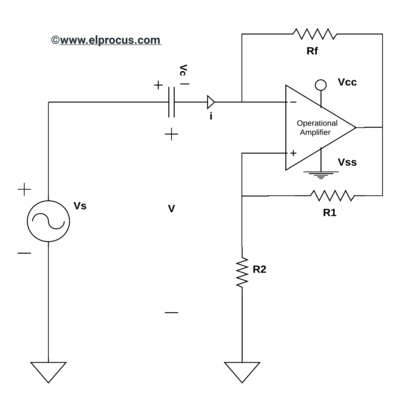
ఒక ప్రత్యేక సింగిల్ కరెంట్ ఈ రెసిస్టర్ గుండా వెళుతుందని మరియు ఆర్మేచర్ రెసిస్టెన్స్ ద్వారా వెళుతుందని భావించి, ఒక ప్రత్యేక రెసిస్టర్ను మోటారుతో అనుసంధానించబడిందని అనుకుందాం, రెండు సిరీస్ రెసిస్టర్లలోని వోల్టేజ్ డ్రాప్ ఆర్మేచర్ రెసిస్టెన్స్ అంతటా డ్రాప్కు సమానం.
వాస్తవానికి, ఈ రెండు నిరోధక విలువలు ఒకేలా ఉన్నప్పుడు ప్రతి రెసిస్టర్లలోని రెండు వోల్టేజ్ మాగ్నిట్యూడ్లు కూడా సమానంగా ఉంటాయని అనుకోవచ్చు. ఈ డేటాతో, మోటారు వోల్టేజ్ నుండి R3 యొక్క వోల్టేజ్ డ్రాప్ను తీసివేయడం సాధ్యమవుతుంది మరియు ప్రాసెసింగ్ కోసం అవసరమైన తిరిగి e.m.f విలువను పొందవచ్చు.

స్థిరమైన టార్క్ కోసం EMF ను తిరిగి ప్రాసెస్ చేస్తోంది
ప్రతిపాదిత సర్క్యూట్ వెనుక భాగాన్ని నిరంతరం పర్యవేక్షిస్తుంది e.m.f. మరియు తదనుగుణంగా కేటాయించిన కుండ నియంత్రణ అమరిక కోసం, మోటారు వేగంతో పాటు వెనుక e.m.f. స్థిరమైన టార్క్ వద్ద నిర్వహించబడుతుందని నిర్ధారించడానికి మోటారు ప్రవాహాన్ని నియంత్రిస్తుంది.
సర్క్యూట్ వర్ణనను సులభతరం చేయడానికి, P2 సర్దుబాటు చేయబడి, దాని మధ్య స్థానానికి ఉంచబడిందని భావించబడుతుంది మరియు రెసిస్టర్ R3 మోటారు ఆర్మేచర్ యొక్క నిరోధక విలువకు సమానంగా ఎంచుకోబడుతుంది.
మోటార్ వోల్టేజ్ లెక్కిస్తోంది
మోటారు వోల్టేజ్ వెనుక భాగాన్ని జోడించడం ద్వారా లెక్కించవచ్చు e.m.f. మోటారు అంతర్గత నిరోధకత Vr అంతటా వోల్టేజ్తో పడిపోయింది.
R3 వోల్టేజ్ Vr ను తగ్గిస్తుందని పరిగణనలోకి తీసుకుంటే, అవుట్పుట్ వోల్టేజ్ Vo + + V కి సమానంగా ఉంటుంది.
IC1 యొక్క విలోమ ఇన్పుట్ (-) వద్ద వోల్టేజ్ Va + Vr గా ఉంటుంది మరియు ఇన్వర్టింగ్ కాని ఇన్పుట్ (+) వద్ద Vi + (Va + 2Vr - Vi) / 2
పై రెండు వోల్టేజ్ మాగ్నిట్యూడ్లు సమానంగా ఉండవలసి ఉన్నందున, పై సమీకరణాన్ని మేము ఇలా నిర్వహిస్తాము:
Va + Vr = Vi + (Va + 2Vr - Vi) / 2
ఈ సమీకరణాన్ని సరళీకృతం చేయడం Va = Vi ని అందిస్తుంది.
పై సమీకరణం వెనుక e.m.f. మోటారు యొక్క నియంత్రణ వోల్టేజ్ వలె అదే స్థాయిలో స్థిరంగా ఉంటుంది. ఇది పి 1 స్పీడ్ సర్దుబాటు యొక్క ఏదైనా పేర్కొన్న అమరిక కోసం స్థిరమైన వేగం మరియు టార్క్ తో పనిచేయడానికి మోటారును అనుమతిస్తుంది.
R3 నిరోధకత మరియు ఆర్మేచర్ నిరోధకత మధ్య ఉన్న వ్యత్యాస స్థాయిని భర్తీ చేయడానికి P2 చేర్చబడింది. నాన్-ఇన్వర్టింగ్ ఇన్పుట్ op amp పై సానుకూల స్పందన యొక్క పరిమాణాన్ని సర్దుబాటు చేయడం ద్వారా ఇది అమలు చేస్తుంది.
Op amp LM3140 ప్రాథమికంగా మోటారు ఆర్మేచర్ అంతటా అభివృద్ధి చేసిన వోల్టేజ్ను మోటారు అంతటా వెనుక emf సమానంతో పోలుస్తుంది మరియు T1 2N3055 యొక్క మూల సామర్థ్యాన్ని నియంత్రిస్తుంది.
T1 ను కాన్ఫిగర్ చేస్తున్నారు ఉద్గారిణి అనుచరుడు మోటారు యొక్క వేగాన్ని దాని మూల సామర్థ్యానికి అనుగుణంగా నియంత్రిస్తుంది. ఆప్ ఆంప్ ద్వారా అధిక బ్యాక్ ఎమ్ఎఫ్ కనుగొనబడినప్పుడు ఇది మోటారు అంతటా వోల్టేజ్ను పెంచుతుంది, దీని ఫలితంగా మోటారు వేగం పెరుగుతుంది మరియు దీనికి విరుద్ధంగా ఉంటుంది.
సరైన పనితీరు కోసం తగిన హీట్సింక్పై టి 1 అమర్చాలి.
సర్క్యూట్ ఎలా సెటప్ చేయాలి
స్థిరమైన టార్క్ మోటారు స్పీడ్ కంట్రోలర్ సర్క్యూట్ యొక్క అమరిక లోడింగ్ పరిస్థితులతో సంబంధం లేకుండా మోటారు స్థిరమైన టార్క్ సాధించే వరకు మోటారుతో P2 ను వివిధ లోడ్లతో సర్దుబాటు చేయడం ద్వారా జరుగుతుంది.
మోడల్ రైళ్ల కోసం సర్క్యూట్ వర్తించినప్పుడు, మోడల్ రైలు మందగించడానికి దారితీసే P2 వైపు P2 ను ఎక్కువగా తిప్పకుండా జాగ్రత్త తీసుకోవాలి మరియు దీనికి విరుద్ధంగా P2 ను వ్యతిరేక దిశలో ఎక్కువగా తిప్పకూడదు, దీని ఫలితంగా ఎత్తుపైకి ప్రవణత ఎక్కేటప్పుడు రైలు వేగం వాస్తవానికి వేగంగా వస్తుంది.
మునుపటి: సింపుల్ ని-సిడి బ్యాటరీ ఛార్జర్ సర్క్యూట్లు అన్వేషించబడ్డాయి తర్వాత: మినీ ట్రాన్స్సీవర్ సర్క్యూట్