ఈ పోస్ట్లో ఆర్డునోను ఉపయోగించి లైన్ ఫాలోయర్ రోబోట్ సర్క్యూట్ను ఎలా నిర్మించాలో నేర్చుకుంటాము, ఇది ప్రత్యేకంగా గీసిన లైన్ లేఅవుట్పై నడుస్తుంది మరియు అది అందుబాటులో ఉన్నంతవరకు మరియు దాని సెన్సార్ల ద్వారా గుర్తించదగినంత వరకు దానిని నమ్మకంగా అనుసరిస్తుంది.
నవనీత్ సజ్వాన్ చేత
లైన్ ఫాలోయర్ రోబోట్ అంటే ఏమిటి
స్వయంప్రతిపత్తమైన రోబోట్ అనేది ఒక యంత్రం, ఇది ప్రోగ్రామర్ సూచించిన విధంగా, నిజ సమయంలో మానవుడిచే మానవీయంగా నియంత్రించబడకుండా చర్యలను చేయగలదు.
లైన్ అనుచరులు (ఎల్ఎఫ్ఆర్లు) ఒకటి లేదా అంతకంటే ఎక్కువ సెన్సార్లు మరియు నలుపు లేదా తెలుపు లైన్ మార్గం ద్వారా మార్గనిర్దేశం చేయబడే స్వయంప్రతిపత్త రోబోట్ కార్లు. అవి ఆధునిక సెల్ఫ్ డ్రైవింగ్ కార్లకు ఆధారం.
ప్రతి స్వయంప్రతిపత్త రోబోట్ మాదిరిగా, లైన్ అనుచరులకు సిగ్నల్ ప్రాసెసింగ్ మరియు నిర్ణయం తీసుకునే యూనిట్, సెన్సార్లు మరియు యాక్యుయేటర్లు ఉంటాయి. మీరు రోబోటిక్స్లో ఒక అనుభవశూన్యుడు మరియు దానిని తీవ్రంగా పరిగణించాలనుకుంటే, మీరు ఇక్కడే ప్రారంభించాలి. దీన్ని తయారు చేయడం ప్రారంభిద్దాం.
ఈ ప్రాజెక్ట్ తయారీకి నేను రెండు ఇన్ఫ్రా-రెడ్ సెన్సార్లు మరియు త్రీ వీల్ డ్రైవ్ ఉపయోగించాను. PID ఆధారిత పంక్తికి ఉపయోగించగల కనీస సంఖ్య సెన్సార్లు ఒకటి మరియు గరిష్టంగా ఎనిమిది సరిపోతాయి.
అవసరమైన భాగాలు:
అర్డునో యునో
చట్రం
రెండు బ్యాటరీతో పనిచేసే (b.o.) మోటార్లు మరియు అనుకూల టైర్లు
కాస్టర్ బాల్
రెండు పరారుణ సెన్సార్లు
మోటార్ డ్రైవర్ మాడ్యూల్
విద్యుత్ సరఫరా
Arduino IDE సాఫ్ట్వేర్
ఇప్పుడు, మా భాగాలను పరిశీలిద్దాం:
అర్దునో వన్ : ఇది మా రోబోట్ యొక్క కంట్రోల్ రూమ్గా g హించుకోండి .ఇప్పుడు, ఈ ప్రాజెక్ట్ కోసం పరిగణించబడిన చాలా అభివృద్ధి బోర్డులు ఉన్నాయి, కానీ ఆర్డునో UNO కేవలం ఇతరులతో సరిపోలలేదు. మా కథానాయకుడు దాని బహుమితీయ లక్షణాల పరంగా ఉన్నతమైనది కాదు.
ఒకవేళ అలా జరిగి ఉంటే, రాస్ప్బెర్రీ పై మరియు ఇంటెల్ ఎడిసన్ దానిని కళ్ళ మధ్య కొట్టేవారు. ఆర్డునో యుఎన్ఓ ఎంపికకు దారితీసిన అత్యంత బలవంతపు వాదనలు ప్రాజెక్ట్ యొక్క లక్షణాలు, ధర, పరిమాణం మరియు అవసరాల కలయికతో ఏర్పడ్డాయి.
కొన్ని సంబంధిత కారణాలు:
పరిమాణం : Atmega16 లేదా Atmega8 ఆధారిత అభివృద్ధి బోర్డులతో పోలిస్తే ఇది చాలా చిన్నది, చట్రంపై కొంచెం స్థలాన్ని వినియోగిస్తుంది, కాబట్టి మీరు కాంపాక్ట్ మరియు సులభ బోట్ను పొందుతారు.
రోబోటిక్స్ పోటీలలో ఇది నిజంగా ముఖ్యమైనది. రోజంతా వేదికలను మారుస్తూ, ఆ పెద్ద అగ్లీ బోట్తో తిరగడాన్ని మీరు ద్వేషిస్తారని నన్ను నమ్మండి.
పరిమాణం చిన్నది, వేగంగా రోబోట్ మరియు మరింత సమర్థవంతమైన మలుపులు.
ఉత్తమ ప్రోటోటైపింగ్ బోర్డు : నిస్సందేహంగా, Arduino UNO కోసం ఉత్తమ లక్షణాల కలయిక ఉంది ప్రోటోటైపింగ్ . మీ సర్క్యూట్లు అమల్లోకి వచ్చాక మరియు మీ ప్రాజెక్ట్ పరిపూర్ణంగా పనిచేసిన తర్వాత మీరు దాన్ని ఆర్డునో నానో మరియు అటిని 85 ఐసి వంటి చిన్న మరియు చౌకైన వాటితో భర్తీ చేయవచ్చు.
వారికి, కళాశాల ప్రాజెక్టులకు లైన్ ఫాలోవర్గా, చివరికి UNO ని నానోతో భర్తీ చేయాలని సూచిస్తున్నాను.
చాసిస్ : ఇది అన్ని భాగాలను స్థితిలో ఉంచే ఫ్రేమ్. కొత్త చట్రం కొనుగోలు చేసేటప్పుడు పరిగణించవలసిన కొన్ని అంశాలు ఉన్నాయి,
ఇది తేలికైనది మరియు బలంగా ఉండాలి.
ప్రాజెక్టుల కోసం, మీరు మార్కెట్ నుండి ఒకదాన్ని కొనుగోలు చేస్తే మంచిది. మీరు పోటీకి సన్నద్ధమవుతుంటే, పోటీ యొక్క కొలతలు మరియు అవసరాలను దృష్టిలో ఉంచుకుని మీ స్వంతం చేసుకోవాలని నేను గట్టిగా సూచిస్తున్నాను.
ప్లాస్టిక్ లేదా చెక్క చట్రం ఎంచుకోండి. లోహ ఫ్రేమ్లు ఆర్డునోతో సంబంధంలోకి వచ్చినప్పుడు, అనేక పిన్లు చిన్నవి అవుతాయి. చట్రం కోసం చూస్తున్నప్పుడు ఇది దృష్టి పెట్టడానికి పెద్ద అంశం.
మీ చట్రం సాధ్యమైనంత తక్కువగా ఉంచండి - ఇది బోట్కు స్థిరత్వాన్ని ఇస్తుంది.
మోటార్లు : తక్కువ బరువు గల బ్యాటరీతో పనిచేసే (B.O.) d.c. మోటార్లు.

కాస్టర్ బాల్ : సాధారణ చక్రాలు ఒకే అక్షంతో అనువాద కదలికను అందిస్తాయి కాని కాస్టర్ బంతి ఉపరితలంపై ఏ దిశలోనైనా కదిలేలా రూపొందించబడింది. ఇది మాకు మూడు వీల్ డ్రైవ్ ఇస్తుంది.
త్రీ వీల్ డ్రైవ్ను 4 వీల్స్ కంటే ఎక్కువ ఇష్టపడటానికి కారణం దాని తులనాత్మక వేగవంతమైన మలుపు చర్య. సరీసృపాలు వంటి ట్రాఫిక్ ద్వారా సైకిల్ రిక్షాలు కుట్టడం మీరు గమనించి ఉండవచ్చు. మా రోబోట్ విషయంలో కూడా అదే.

సెన్సార్స్ : ఇది మన వాతావరణం యొక్క ఏదైనా భౌతిక పరామితిని గుర్తించే లేదా కొలిచే పరికరం మరియు దానిని విద్యుత్ సంకేతాలుగా మారుస్తుంది. ఈ సందర్భంలో కనుగొనబడిన పరామితి ఇన్ఫ్రా-ఎరుపు కిరణాలు.
ఏదైనా రోబోట్కు సెన్సార్లు చాలా ప్రాథమికమైనవి. బాగా, ఆర్డునో మా బోట్ యొక్క మెదడు అయితే, సెన్సార్లు కళ్ళ పాత్రను పోషిస్తాయి. సెన్సార్ల గురించి ఇక్కడ కొన్ని విషయాలు ఉన్నాయి:
సెన్సార్లు భూమిని ఎదుర్కొనే విధంగా ఉండాలి.
మీ బోట్ ముందు చివర ఉంచాలి.
వాటి మధ్య కనీస అంతరం నల్ల రేఖ యొక్క వెడల్పు కంటే ఎక్కువగా ఉండాలి.
మోటర్ డ్రైవర్ బోర్డు : మోటారు-డ్రైవర్లు బఫర్ సర్క్యూట్లు, ఇవి అధిక వోల్టేజ్ అవసరమయ్యే మోటారులను శక్తివంతం చేయడానికి తక్కువ వోల్టేజ్ సంకేతాలను తీసుకుంటాయి.
మా విషయంలో, ఆర్డునో మోటార్లు నడపడానికి తగిన వోల్టేజ్ను అందించగలదు కాని అది తగినంత కరెంట్ను అందించదు. Arduino UNO యొక్క 5v మరియు GND పిన్స్ ప్రస్తుత రేటింగ్ 200mA కలిగివుండగా, ఏదైనా GPIO పిన్ 40 mA రేటింగ్ కలిగి ఉంటుంది. ఇది మనకు అవసరమైన ప్రారంభ మరియు స్టాల్ ప్రవాహాల మోటార్లు కంటే తక్కువ.
ఈ ప్రాజెక్ట్ కోసం నేను ఇష్టపడే రెండు మోటారు డ్రైవర్లు ఉన్నారు: L298N మరియు L293D. ఈ ప్రాజెక్ట్ చేయడానికి ఈ రెండూ సమానంగా సరిపోతాయి.
అయినప్పటికీ, L293D తులనాత్మకంగా తక్కువ కానీ తక్కువ ప్రస్తుత రేటింగ్ ఉంది. వారి కనెక్షన్లు దాదాపు ఒకే విధంగా ఉంటాయి. నేను రెండింటికీ కనెక్షన్లను ఇచ్చాను కాబట్టి, మీరు మీ బోట్ను ఎలా తయారు చేయాలో పూర్తిగా మీ ఇష్టం.


విద్యుత్ సరఫరా :
12 v అడాప్టర్ లేదా బ్యాటరీని ఉపయోగించండి (12 వోల్ట్ల కంటే ఎక్కువ కాదు).
భాగాల ప్లేస్మెంట్ (ముందు నుండి వెనుక చివర వరకు):
మీ బోట్ యొక్క తల వద్ద సెన్సార్లు.
మధ్యలో కాస్టర్ వీల్.
మోటార్లు మరియు టైర్లు వెనుకవైపు ఒక వరుసలో ఉంటాయి.
కనెక్షన్లు:
ARDUINO కు సెన్సార్లు :
చూపిన విధంగా సెన్సార్ పిన్ను ఆర్డునో పిన్తో కనెక్ట్ చేయండి,


| సెన్సార్ పిన్ | ఆర్డునో పిన్ |
| విసిసి (5 వి) | 5 వి |
| GND (G) | GND |
| ఎడమ సెన్సార్ అవుట్ (DO) | పిన్ 6 |
| కుడి సెన్సార్ అవుట్ (చేయండి) | పిన్ 7 |
గమనిక: మీ సెన్సార్లు శక్తితో ఉన్నాయో లేదో తనిఖీ చేయడానికి, మీ సెల్ ఫోన్ కెమెరాను ఐఆర్ ట్రాన్స్మిటర్ లీడ్ వద్ద సూచించండి. మా నగ్న కళ్ళతో చూడలేని తెరపై మీరు మెరుస్తున్నట్లు చూస్తారు. కొన్ని ఆధునిక సెల్ ఫోన్ కెమెరాలలో ఇన్ఫ్రా రెడ్ ఫిల్టర్ ఉంది. కాబట్టి, దయచేసి దానిని పరిగణనలోకి తీసుకోండి.
మోటర్ టు మోటర్ డ్రైవర్:
ప్రతి మోటారుకు రెండు టెర్మినల్స్ ఉన్నాయి, వీటిని మోటారు డ్రైవర్తో అనుసంధానించాలి. వాటిని నేరుగా arduino కి కనెక్ట్ చేయడానికి ఎప్పుడూ ప్రయత్నించవద్దు. మీ బోట్ వెనుక నుండి చూస్తే, మీకు సమీపంలో ఉన్న మోటార్లు మరియు సెన్సార్లతో, వాటిని ఈ క్రింది విధంగా కనెక్ట్ చేయండి:


| ఇంజిన్ | ఎల్ 298 ఎన్ | ఎల్ 293 డి |
| ఎడమ మోటర్ | పిన్ 1 మరియు 2 | పిన్ 7 మరియు 8 |
| కుడి మోటర్ | పిన్ 13 మరియు 14 | పిన్ 9 మరియు 10 |
ఆర్డునో యునోకు మోటర్ డ్రైవర్:

| మోటర్ డ్రైవర్ (L298N) | అర్దునో వన్ |
| పిన్ 4 | వైన్ |
| పిన్ 5 | GND |
| పిన్ 6 | 5 వి |
| పిన్ 8 & పిన్ 9 | పిన్ 3 & పిన్ 9 |
| పిన్ 10 & పిన్ 11 | పిన్ 5 & పిన్ 10 |
| పిన్ 7 & పిన్ 12 | 5 వి |
| మోటర్ డ్రైవర్ (ఎల్ 293 డి) | అర్దునో వన్ |
| పిన్ 3 | వైన్ |
| పిన్ 2 | GND |
| పిన్ 1 | 5 వి |
| పిన్ 5 మరియు పిన్ 6 | పిన్ 3 & పిన్ 9 |
| పిన్ 11 మరియు పిన్ 12 | పిన్ 5 & పిన్ 10 |
| పిన్ 4 మరియు పిన్ 5 | 5 వి |
గమనిక: 1 మరియు 2 కి అనుసంధానించబడిన మోటారును నియంత్రించడానికి l298n యొక్క పిన్స్ 8 మరియు 9 ఉపయోగించబడతాయి. మరియు, పిన్స్ 13 మరియు 14 లకు అనుసంధానించబడిన 10 మరియు 11 కంట్రోల్ మోటారు. అదేవిధంగా, l293d యొక్క 5 మరియు 6 పిన్స్ అనుసంధానించబడిన మోటారును నియంత్రించడానికి ఉపయోగిస్తారు. 7 మరియు 8. మరియు, పిన్స్ 9 మరియు 10 లకు అనుసంధానించబడిన 12 మరియు 11 కంట్రోల్ మోటారు.
ఇక్కడ మేము అబ్బాయిలు, డిజైన్ భాగం చివరి వరకు. మనకు ఇంకా కోడింగ్ ఉంది, కానీ దీనికి ముందు మేము లైన్-ఫాలోయింగ్ను అనుమతించే సూత్రాల ద్వారా వెళ్తాము.
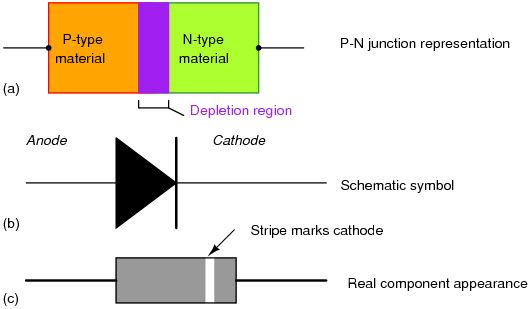
ఇన్ఫ్రా రెడ్ సెన్సార్ ఎలా పనిచేస్తుంది:
ఇన్ఫ్రా రెడ్ సెన్సార్లు (ఐఆర్ సెన్సార్లు) రంగులలో వ్యత్యాసాన్ని మరియు వస్తువుల సామీప్యాన్ని గ్రహించడానికి ఉపయోగించవచ్చు. ఐఆర్ సెన్సార్ పని వెనుక ఉన్న సూత్రం చాలా ప్రాథమికమైనది.
మనం చూడగలిగినట్లుగా, దీనికి రెండు లెడ్స్ ఉన్నాయి - ఐఆర్ ఎమిటింగ్ లీడ్ మరియు ఫోటోడియోడ్. అవి ట్రాన్స్మిటర్-రిసీవర్ జతగా పనిచేస్తాయి. ఉద్గారిణి కిరణాల ముందు ఒక అడ్డంకి వచ్చినప్పుడు, అవి తిరిగి ప్రతిబింబిస్తాయి మరియు రిసీవర్ చేత అడ్డగించబడతాయి.
ఇది డిజిటల్ సిగ్నల్ను ఉత్పత్తి చేస్తుంది, ఇది మైక్రోకంట్రోలర్లకు మరియు యాక్యుయేటర్లకు అడ్డంకిని ఎదుర్కోవడంలో అవసరమైన చర్యలు తీసుకోవచ్చు.
ప్రాథమిక భౌతిక శాస్త్రం ఒక నల్ల శరీరం దానిపై ఉన్న అన్ని విద్యుదయస్కాంత వికిరణ సంఘటనలను గ్రహిస్తుంది, తెల్లటి శరీరం దానిని ప్రతిబింబిస్తుంది. తెలుపు మరియు నలుపు ఉపరితలం మధ్య తేడాను గుర్తించడానికి ఈ సూత్రాన్ని ఒక లైన్ అనుచరుడు ఉపయోగించుకుంటాడు.
లైన్ అనుచరుడు రోబోట్ ఎలా పనిచేస్తుంది:

సాధారణ స్థితిలో, రోబోట్ రెండు సెన్సార్లు తెలుపు కంటే ఎక్కువగా ఉండే విధంగా కదులుతుంది మరియు రెండు సెన్సార్ల మధ్య బ్లాక్ లైన్ ఉంటుంది.
బోట్ ముందుకు దిశలో కదిలే మోటార్లు రెండింటినీ తిప్పడానికి ఇది ప్రోగ్రామ్ చేయబడింది.
చాలా సహజంగా, సమయం గడిచేకొద్దీ రెండు సెన్సార్లలో ఒకటి బ్లాక్ లైన్ పైకి వస్తుంది.
ఎడమ సెన్సార్ రేఖపైకి వస్తే, ఎడమ మోటార్లు విశ్రాంతికి తీసుకురాబడతాయి మరియు ఫలితంగా బోట్ ఎడమ వైపుకు తిరగడం ప్రారంభిస్తుంది తప్ప ఎడమ సెన్సార్ తెల్లటి ఉపరితలంపైకి వచ్చి సాధారణ స్థితి సాధించబడదు.
అదేవిధంగా, కుడి సెన్సార్ బ్లాక్ లైన్ పైకి వచ్చినప్పుడు, కుడి మోటార్లు ఆపివేయబడతాయి మరియు తత్ఫలితంగా బోట్ ఇప్పుడు కుడి వైపుకు తిరుగుతుంది తప్ప తెల్లటి ఉపరితలంపై సెన్సార్ తిరిగి రాదు. టర్నింగ్ యొక్క ఈ విధానాన్ని డిఫరెన్షియల్ డ్రైవ్ మెకానిజం అంటారు.
సర్క్యూట్ డైగ్రామ్:

వైరింగ్ వివరాలు:

ప్రోగ్రామింగ్ మరియు కాన్సెప్ట్స్:
సర్క్యూట్ భాగంతో పూర్తి చేసిన తరువాత, మేము ఇప్పుడు ప్రోగ్రామింగ్ భాగానికి వెళ్తాము. ఈ విభాగంలో, మా రోబోట్ను నియంత్రించే ప్రోగ్రామ్ను మేము అర్థం చేసుకుంటాము. ఇక్కడ కోడ్ ఉంది: / * Created and tested by Navneet Singh Sajwan
*Based on digital output of two sensors
*Speed control added
*/
int left, right
int value=250
void setup()
{
pinMode(6,INPUT)//left sensor
pinMode(7,INPUT)//right sensor
pinMode(9,OUTPUT)//left motor
pinMode(3,OUTPUT)//left motor
pinMode(10,OUTPUT)//right motor
pinMode(5,OUTPUT)//right motor
// Serial.begin(9600)
}
void read_sensors()
{
left=digitalRead(6)
right= digitalRead(7)
}
void move_forward()
{
analogWrite(9,value)//3,9 for left motor
digitalWrite(3,LOW)
analogWrite(10,value)//10,5 for right motor
digitalWrite(5,LOW)
}
void turn_left()
{
digitalWrite(9,LOW)//9,3 for left motor
digitalWrite(3,LOW)
analogWrite(10,value)//10,5 for right motor
digitalWrite(5,LOW)
}
void turn_right()
{
analogWrite(9,value)// 9,3 for left motor
digitalWrite(3,LOW)
digitalWrite(10,LOW)// 10,5 for right motor
digitalWrite(5,LOW)
}
void halt()
{
digitalWrite(9,LOW)// 9,3 for left motor
digitalWrite(3,LOW)
digitalWrite(10,LOW)// 10,5 for right motor
digitalWrite(5,LOW)
}
void print_readings()
{
Serial.print(' leftsensor')
Serial.print(' ')
Serial.print(left)
Serial.print('rightsensor')
Serial.print(' ')
Serial.print(right)
Serial.println()
}
void loop()
{
read_sensors()
while((left==0)&&(right==1)) // left sensor is over black line
{
turn_left()
read_sensors()
print_readings()
}
while((left==1)&&(right==0)) // right sensor is over black line
{
turn_right()
read_sensors()
print_readings()
}
while((left==0)&&(right==0)) // both sensors over the back line
{
halt()
read_sensors()
print_readings()
}
while((left==1)&&(right==1))// no sensor over black line
{
move_forward()
read_sensors()
print_readings()
}
}
ఉపయోగించిన ఫంక్షన్ల వివరణ:
read_sensors (): ఇది రెండు సెన్సార్ల యొక్క రీడింగులను తీసుకుంటుంది మరియు వాటిని ఎడమ మరియు కుడి వేరియబుల్స్లో నిల్వ చేస్తుంది.
move_forward (): arduino ఈ ఫంక్షన్ను అమలు చేసినప్పుడు, రెండు మోటార్లు ముందుకు దిశలో కదులుతాయి.
turn_left (): ఎడమ మోటారు ఆగుతుంది. బొట్ ఎడమవైపు తిరుగుతుంది.
turn_right (): కుడి మోటారు ఆగుతుంది. బొట్ కుడివైపు తిరుగుతుంది.
halt (): బొట్ ఆగుతుంది.
print_readings (): సీరియల్ మానిటర్లో సెన్సార్ల రీడింగులను ప్రదర్శిస్తుంది. దీని కోసం మీరు శూన్యమైన సెటప్లో “Serial.begin (9600)” ని అన్కామెంట్ చేయాలి.
సెన్సార్ రీడింగ్స్:
| సెన్సార్ ఓవర్ లైన్ | సెన్సార్ రీడింగ్స్ | |
| ఎడమ | హక్కు | |
| ఎడమ సెన్సార్ | 0 | 1 |
| కుడి సెన్సార్ | 1 | 0 |
| లేదు | 1 | 1 |
| రెండు | 0 | 0 |
వేగ నియంత్రణ:
కొన్నిసార్లు మోటారుల వేగం చాలా ఎక్కువగా ఉంటుంది, ఆర్డ్యునో సెన్సార్ సిగ్నల్స్ ను వివరించే ముందు, రోబోట్ లైన్ కోల్పోతుంది. సంక్షిప్తంగా, బోట్ అధిక వేగం కారణంగా పంక్తిని అనుసరించదు మరియు అల్గోరిథం సరైనది అయినప్పటికీ పంక్తిని కోల్పోతుంది.
అటువంటి పరిస్థితులను నివారించడానికి, మేము పిడబ్ల్యుఎం టెక్నిక్ ఉపయోగించి బోట్ వేగాన్ని తగ్గిస్తాము. పై కోడ్లో విలువ అనే వేరియబుల్ ఉంది.
వేగాన్ని తగ్గించడానికి ఫంక్షన్లో సంఖ్యా విలువను తగ్గించండి. Arduino UNO లో మీరు pwm విలువలను 0 మరియు 255 మధ్య మాత్రమే కలిగి ఉండవచ్చు.
అనలాగ్రైట్ (పిన్, విలువ)
0<= value <=255
లైన్ ఫాలోయర్లో నా పోస్ట్ ముగింపు ఇది. మీ బర్నింగ్ ప్రశ్నలన్నింటికీ సమాధానం ఇవ్వడానికి ఇది తగినంత వివరంగా ఉందని నేను ఆశిస్తున్నాను మరియు అరుదైన వాస్తవానికి అది కాకపోతే, మీ కోసం వ్యాఖ్య విభాగం ఎల్లప్పుడూ అందుబాటులో ఉంటుంది. మీ సందేహాలను వ్యాఖ్యానించండి. సంతోషంగా టింకరింగ్ చేయండి!
మునుపటి: DTMF మాడ్యూల్ ఉపయోగించి మొబైల్ ఫోన్ కంట్రోల్డ్ రోబోట్ కార్ తర్వాత: పాస్వర్డ్ నియంత్రిత ఎసి మెయిన్స్ ఆన్ / ఆఫ్ స్విచ్