
CAN లేదా కంట్రోలర్ ఏరియా నెట్వర్క్ రెండు వైర్డ్ హాఫ్-డ్యూప్లెక్స్ హై-స్పీడ్ సీరియల్ నెట్వర్క్ టెక్నాలజీ. ఇది ప్రాథమికంగా ఆటోమొబైల్ వంటి తక్కువ వ్యాసార్థం ప్రాంతంలోని వివిధ పరికరాల మధ్య కమ్యూనికేషన్లో ఉపయోగించబడుతుంది. CAN ప్రోటోకాల్ అనేది CSMA-CD / ASM ప్రోటోకాల్ లేదా క్యారియర్ సెన్స్ మెసేజ్ ప్రియారిటీ ప్రోటోకాల్పై బహుళ యాక్సెస్ ఘర్షణ గుర్తింపు మధ్యవర్తిత్వం. ఏదైనా సందేశం పంపే ముందు ప్రతి నోడ్ ఇచ్చిన వ్యవధి కోసం వేచి ఉండాలని CSMA నిర్ధారిస్తుంది. ఘర్షణ గుర్తింపు వారు సూచించిన ప్రాధాన్యత ఆధారంగా సందేశాలను ఎంచుకోవడం ద్వారా ఘర్షణను నివారించగలదని నిర్ధారిస్తుంది.
ఇది 125kbps నుండి 1 Mbps వరకు సిగ్నలింగ్ రేటును అందిస్తుంది. ఇది 2048 వేర్వేరు సందేశ ఐడెంటిఫైయర్లను అందిస్తుంది.
ఇది ISO-11898 ప్రమాణం మరియు 7 లేయర్ ఓపెన్ సిస్టమ్స్ ఇంటర్ కనెక్షన్ మోడల్ను ఉపయోగించుకుంటుంది.
చరిత్ర:
దీనిని 1982 లో రాబర్ట్ బాష్ అభివృద్ధి చేశారు మరియు 1986 లో డెట్రాయిట్ సొసైటీ ఆఫ్ ఆటోమోటివ్ ఇంజనీర్స్ అధికారికంగా విడుదల చేశారు. CAN బస్సును సమగ్రపరిచే మొదటి కారును 1992 లో మెర్సిడెస్ బెంజ్ తయారు చేసింది.
ISO 11898 ఆర్కిటెక్చర్:

చిత్ర మూలం - అక్కడ
లేయర్డ్ ఆర్కిటెక్చర్ మూడు పొరలను కలిగి ఉంటుంది
- అప్లికేషన్ లేయర్ : ఇది ఆపరేటింగ్ సిస్టమ్ లేదా CAN పరికరం యొక్క అనువర్తనంతో సంకర్షణ చెందుతుంది.
- డేటా లింక్ లేయర్ : ఇది డేటాను పంపడం, స్వీకరించడం మరియు ధృవీకరించడం పరంగా వాస్తవ డేటాను ప్రోటోకాల్కు కలుపుతుంది.
- భౌతిక పొర : ఇది వాస్తవ హార్డ్వేర్ను సూచిస్తుంది.
ప్రామాణిక CAN ఫ్రేమ్ కింది బిట్లను కలిగి ఉంటుంది:
 ప్రామాణిక CAN ఫ్రేమ్ కింది బిట్లను కలిగి ఉంటుంది:
ప్రామాణిక CAN ఫ్రేమ్ కింది బిట్లను కలిగి ఉంటుంది:
- SOF- Fr ప్రారంభం ame. సందేశం ఈ దశ నుండి మొదలవుతుంది.
- గుర్తించండి : ఇది సందేశం యొక్క ప్రాధాన్యతను నిర్ణయిస్తుంది. బైనరీ విలువను తగ్గించండి, ఎక్కువ ప్రాధాన్యత ఇవ్వబడుతుంది. ఇది 11 బిట్.
- ఆర్టీఆర్ - రిమోట్ ట్రాన్స్మిషన్ అభ్యర్థన. మరొక నోడ్ నుండి సమాచారం అవసరమైనప్పుడు ఇది ప్రబలంగా ఉంటుంది. ప్రతి నోడ్ అభ్యర్థనను స్వీకరిస్తుంది, కానీ సందేశంతో గుర్తించే నోడ్ మాత్రమే అవసరమైన నోడ్. ప్రతి నోడ్ ప్రతిస్పందనను కూడా అందుకుంటుంది
- ఇక్కడ - ఒకే గుర్తింపు పొడిగింపు. ఇది ఆధిపత్యంగా ఉంటే, పొడిగింపు లేని ప్రామాణిక CAN ఐడెంటిఫైయర్ ప్రసారం చేయబడదని దీని అర్థం.
- R0 - రిజర్వు బిట్.
- DLC - డేటా పొడవు కోడ్. ఇది పంపిన డేటా యొక్క పొడవును నిర్వచిస్తుంది. ఇది 4 బిట్
- సమాచారం - 64 బిట్ వరకు డేటాను ప్రసారం చేయవచ్చు.
- సిఆర్సి - చక్రీయ పునరావృత తనిఖీ. లోపం గుర్తించడానికి మునుపటి అప్లికేషన్ డేటా యొక్క చెక్సమ్ (ప్రసారం చేసిన బిట్ల సంఖ్య) ఇందులో ఉంది.
- అయ్యో - గుర్తించండి. ఇది 2 బిట్ కోసం. ఖచ్చితమైన సందేశం వస్తే అది ఆధిపత్యం.
- EOF - ఫ్రేమ్ ముగింపు. ఇది కెన్ ఫ్రేమ్ ముగింపును సూచిస్తుంది మరియు బిట్ కూరటానికి నిలిపివేస్తుంది.
- IFS - ఇంటర్ ఫ్రేమ్ స్పేస్. సరిగ్గా అందుకున్న ఫ్రేమ్ను సరైన స్థానానికి తరలించడానికి నియంత్రికకు అవసరమైన సమయాన్ని ఇది కలిగి ఉంటుంది.
5 విభిన్న సందేశ రకాలు:
- డేటా ఫ్రేమ్ : ఇది ఏకపక్ష క్షేత్రం, డేటా ఫీల్డ్, CRC ఫీల్డ్ మరియు రసీదు ఫీల్డ్లను కలిగి ఉంటుంది.
- రిమోట్ ఫ్రేమ్ : ఇది మరొక నోడ్ నుండి డేటాను ప్రసారం చేయమని అభ్యర్థిస్తుంది. ఇక్కడ RTR బిట్ రిసెసివ్.
- లోపం ఫ్రేమ్ : లోపం గుర్తించినప్పుడు ఇది ప్రసారం అవుతుంది.
- ఓవర్లోడ్ ఫ్రేమ్ : సందేశాల మధ్య ఆలస్యాన్ని అందించడానికి ఇది ఉపయోగించబడుతుంది. నోడ్స్ చాలా బిజీగా ఉన్నప్పుడు ఇది ప్రసారం అవుతుంది.
- చెల్లుబాటు అయ్యే ఫ్రేమ్ : EOF ఫీల్డ్ రిసెసివ్ అయితే సందేశం చెల్లుతుంది. లేకపోతే సందేశం మళ్ళీ ప్రసారం చేయబడుతుంది.
భౌతిక పొరను చేయవచ్చు:
బస్సు చేయవచ్చు

చిత్ర మూలం - Digital.ni
ఇది రెండు-వైర్ సీరియల్ లింక్- CAN_H మరియు CAN_L ను కలిగి ఉంటుంది మరియు వాటి వోల్టేజ్ స్థాయిలు ఒకదానికొకటి సాపేక్షంగా 1 లేదా 0 ప్రసారం అవుతుందో లేదో నిర్ణయిస్తాయి. ఇది అవకలన సిగ్నలింగ్. ప్రతి సిగ్నల్ లైన్లో ప్రస్తుత ప్రవాహం సమానంగా ఉంటుంది, కానీ దిశలో వ్యతిరేకం, దీని ఫలితంగా ఫీల్డ్-రద్దు ప్రభావం తక్కువ శబ్దం ఉద్గారాలకు కీలకం. ఇది సమతుల్య అవకలన సిగ్నలింగ్ను నిర్ధారిస్తుంది, ఇది శబ్దం కలపడం తగ్గిస్తుంది మరియు వైర్లపై అధిక ప్రసారాన్ని అనుమతిస్తుంది. సాధారణంగా, వైర్లు 40 మీటర్ల బస్సు పొడవు మరియు గరిష్టంగా 30 నోడ్లతో వక్రీకృత జత కేబుల్స్. ఇది 120 ఓంల లక్షణం ఇంపెడెన్స్తో కవచం లేదా షీల్డ్ చేయని కేబుల్.
ట్రాన్స్సీవర్ చేయవచ్చు:

హ్యూగో ప్రోవెంచర్ ద్వారా వాహనాల కోసం చేయవచ్చు. రెండు వైర్లు CANH మరియు CANL సాధారణంగా రెండు ట్రాన్సిస్టర్లు మరియు 2.5V వోల్టేజ్ మూలం ద్వారా నిర్ణయించబడతాయి. ప్రాథమికంగా రెండు వైర్ల మధ్య వ్యత్యాసం ఎల్లప్పుడూ 0 గా ఉండాలి. డ్రైవర్ నియంత్రణ CANH మరియు CANL వైర్లకు వర్తించే వోల్టేజ్ను నిర్ణయిస్తుంది. రెండు ట్రాన్సిస్టర్లు నిర్వహిస్తున్నప్పుడు, వోల్టేజ్ 1 అంతటా పడిపోతుందిస్టంప్ట్రాన్సిస్టర్ మరియు డయోడ్ 1.5 వి, CANH వైర్ 3.5V వరకు లాగండి. 2 అంతటా వోల్టేజ్ డ్రాప్ndట్రాన్సిస్టర్ మరియు డయోడ్ 1 వి, CANL వైర్ 1.5V కి లాగండి. అధిక వోల్టేజ్ రక్షణ కోసం డయోడ్లను ఉపయోగిస్తారు. రిసీవర్ ఒక డిస్క్రిమినేటర్ సర్క్యూట్, ఇది రెండు ఇన్పుట్లు CANH మరియు CANL ఒకేలా ఉన్నప్పుడు 1 యొక్క అవుట్పుట్ మరియు రెండు ఇన్పుట్లు భిన్నంగా ఉంటే 0 యొక్క అవుట్పుట్ ఇస్తుంది. TXD డామినెంట్ బ్లాక్ గ్రౌండ్ ఫాల్ట్ ప్రొటెక్షన్ కోసం ఉపయోగించబడుతుంది మరియు డయోడ్లు మరియు ట్రాన్సిస్టర్లు వేడెక్కినట్లయితే థర్మల్ షట్డౌన్ బ్లాక్ డ్రైవర్ నియంత్రణను నిలిపివేస్తుంది.
CAN యొక్క ప్రయోజనాలు:
- ఇది పంపిణీ నియంత్రణ అయినందున ఇది వైరింగ్ను తగ్గిస్తుంది మరియు ఇది సిస్టమ్ పనితీరును మెరుగుపరుస్తుంది.
- చాలా CAN చిప్ డేటా లింక్ పొరను మరియు భౌతిక పొరను చిప్కు అనుసంధానించబడి ఉంటుంది మరియు అన్ని సాఫ్ట్వేర్ డెవలపర్ చేయవలసింది అప్లికేషన్ కోడింగ్ను అభివృద్ధి చేయడమే.
- ఇది వేర్వేరు విద్యుత్ వాతావరణాలలో పని చేసే సామర్థ్యాన్ని అందిస్తుంది మరియు శబ్దం లేని ప్రసారాన్ని నిర్ధారిస్తుంది.
- వారి ప్రాధాన్యత ఆధారంగా సందేశాలు ప్రసారం కావడంతో ట్రాఫిక్ రద్దీ తొలగించబడుతుంది మరియు ఇది మొత్తం నెట్వర్క్ సమయ పరిమితులను తీర్చడానికి అనుమతిస్తుంది.
- ప్రతి నోడ్ సందేశం ప్రసారం చేసేటప్పుడు లోపాలను తనిఖీ చేయగలదు మరియు లోపం ఫ్రేమ్ను పంపగలదు కాబట్టి ఇది లోపం లేని ప్రసారానికి అందిస్తుంది.
పని ఉదాహరణ:
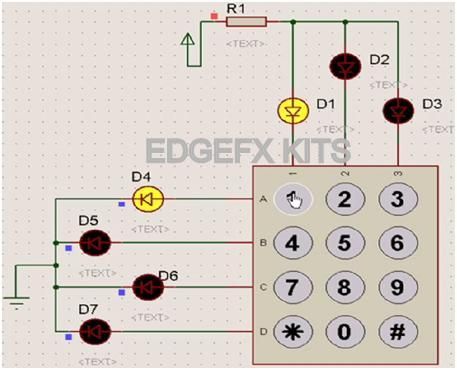
కంట్రోలర్ ఏరియా నెట్వర్క్ పారిశ్రామిక మరియు వాహనాలలో విస్తారమైన అనువర్తనాలను కలిగి ఉంది. వాహనంలోని వేర్వేరు పరికరాల మధ్య కమ్యూనికేషన్లో ప్రధాన అనువర్తనాల్లో ఒకటి పాల్గొంటుంది. మరొకటి వేర్వేరు మైక్రోకంట్రోలర్లలో ఉండవచ్చు, పాస్వర్డ్ను గుర్తించడం కోసం అనుకుందాం, పాస్వర్డ్ ఉపయోగించి లాక్ చేయబడిన తలుపు తెరవడం లేదా బల్బును మార్చడం వంటి ఏవైనా అవసరాలను తీర్చడానికి ఉపయోగిస్తారు.

కంట్రోలర్ ఏరియా నెట్వర్క్ సర్క్యూట్
ప్రాథమిక అనువర్తనం CAN నెట్వర్క్లో ఉన్నట్లుగా రెండు వైర్లను ఉపయోగించి ఒకదానితో ఒకటి సంభాషించే 3 మైక్రోకంట్రోలర్లను కలిగి ఉంటుంది. ది 1స్టంప్మైక్రోకంట్రోలర్ ఒక కీప్యాడ్, 2 తో ఇంటర్ఫేస్ చేయబడిందిndఒక LCD తో, మరియు మూడవది బజర్ మరియు రిలేతో దీపం నడుపుతుంది. కీప్యాడ్లో పాస్వర్డ్ నమోదు చేసినప్పుడు, 2ndమైక్రోకంట్రోలర్ రిసీవర్గా పనిచేస్తుంది మరియు ప్రసారం చేయబడిన సందేశాన్ని బిట్ ద్వారా 1 నుండి స్వీకరిస్తుందిస్టంప్ట్రాన్స్మిటర్ మరియు సందేశాన్ని LCD లో ప్రదర్శిస్తుంది. మొత్తం సందేశం ప్రసారం అయినప్పుడు, 2ndమైక్రోకంట్రోలర్ ధృవీకరణ చేస్తుంది మరియు పాస్వర్డ్ తప్పు అయితే, అది 3 కి సిగ్నల్ పంపుతుందిrdమైక్రోకంట్రోలర్, ఈ సిగ్నల్తో బజర్ను ఆన్ చేస్తుంది. పాస్వర్డ్ సరైనది అయినప్పుడు, 3rdమైక్రోకంట్రోలర్ రిలేపై స్విచ్ చేస్తుంది, ఇది దీపం మీద మారుతుంది.
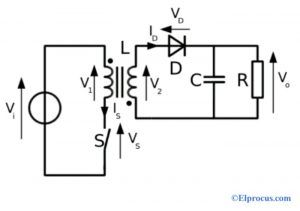


![ఒక సాధారణ బక్ కన్వర్టర్ సర్క్యూట్ను నిర్మించండి [స్టెప్ డౌన్ కన్వర్టర్]](https://electronics.jf-parede.pt/img/3-phase-power/D0/build-a-simple-buck-converter-circuit-step-down-converter-1.jpg)








{kind=link}
{kind=link}